Collaborative Research: Modeling and Analysis of Advanced Parking Management for Traffic Congestion Mitigation (CMMI #1724168)
Introduction
Parking is a growing problem in dense urban areas. To many, finding a parking space in these areas is an unpleasant experience of uncertainty and frustration. Cruising for parking makes traffic on already-congested urban streets even worse and leads to significant waste in time and fuel. In transportation, smartphone-based parking management applications have emerged. These applications help drivers find parking spaces by allowing them to use smartphones to view real-time availability and prices of parking spaces and guide them to open parking spaces, reserved or otherwise. This award develops theoretical foundations and methodologies for analyzing these emerging parking management services. Results from this research provide a better understanding of the impacts of advanced parking management services on parking competition and travel patterns. The research develops policies to reduce traffic congestion and emissions in dense urban areas. This award positively impacts engineering education by offering new materials and case studies and engaging underrepresented student groups in research.
Using game-theoretic, dynamic and stochastic programming approaches to investigate both temporal and spatial travel patterns with advanced parking management, this project generates a set of analytical tools that explain the underlying working mechanisms of advanced parking management services and gauge their potential for reducing traffic congestion. The theoretical efforts in this research are complemented by an agent-based simulation, which tests the validity and applicability of the theories, and unveils complex outcomes of parking competition under realistic parking search behaviors. This work advances the knowledge and analysis of parking management and enriches the literature of modeling morning commute and vehicle routing.
Simulation
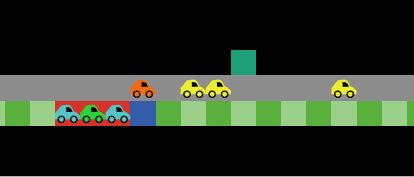
We apply NetLogo to construct agent-based simulation models to verify the predictions and insights drawn from the proposed theoretical tools considering different parking management services, such as parking information, reservation, as well as status quo.
Specifically, we consider a long one-way street where the destination is located and on-street parking spaces are scattered around the destination. Drivers who go to the destination need to select one of the available spaces to park. They are assumed to make this selection in a way that minimizes their walking time to the destination. Further, because the street is one-way and very long, once a driver has passed a parking space, she would not be able to come back for it.
Status quo: since drivers have no access to parking information or reservation services, we assume that they will start cruising for parking at different spaces based on their different risk-taking attitudes. For example, risk-averse dirvers prefer to start cruising for parking at spaces far from their destination, while risk-seeking drivers may drive very close to the destination and start from there.
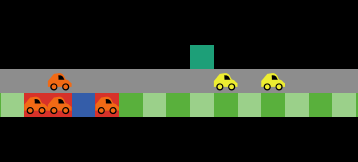
Information: although drivers have access to an information service, it may not be wise for drivers to simply drive to the best currently available space, because another driver before them may take the space and other occupied spaces may soon become vacant. Therefore, we assume that drivers will start cruising for parking at a particular space and then take the first vacant space and walk to the final destination.
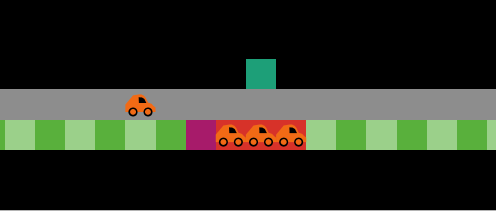
Reservation: since drivers are allowed to reserve parking spaces, they are assumed to reserve the vacant one closest to the destination when they enter the street.
Publications
- Xu, Z., Yin, Y. and Zha, L. (2017) Optimal parking provision for ride-sourcing services. Transportation Research Part B, 105, 559–578.
- Chen, Z., Xu, Z., Zangui, M. and Yin, Y. (2016) Analysis of advanced management of curbside parking. Transportation Research Record, 2567, 57–66.
- Chen, Z., Yin, Y., He, F. and Lin, J. (2015) Parking reservation for managing downtown curbside parking. Transportation Research Record, 2498, 12–18.
- Liu, W., Yin, Y. and Yang, H. (2015) Effectiveness of variable speed limits considering commuters’ long-term response. Transportation Research Part B, 81, 498–519.
- Liu, W., Yang, H. and Yin, Y. (2015) Efficiency of a highway use reservation system for morning commute. Transportation Research Part C, 56, 293–308.
- He, F., Yin, Y., Chen, Z. and Zhou, J. (2015) Pricing of parking games with atomic players. Transportation Research Part B, 73, 1–12.